서빙로봇 서스펜션: 서빙로봇 이리온2의 주행을 바꾸는 두 가지 핵심 기술
서빙로봇 서스펜션 개선, 폴라리스쓰리디의 고민
요즘 식당에 들어서면 서빙로봇을 흔히 볼 수 있습니다.
이제 서빙로봇은 더 이상 낯선 존재가 아니며, 그만큼 고객과 점주가 로봇에 기대하는 수준도 점점 높아지고 있습니다. 특히 서빙로봇은 사람을 위한 서비스를 제공하고, 사람과 같은 공간에서 함께 움직이는 존재이기에 ‘안전성’은 무엇보다 중요한 요소입니다. 하지만 단순히 이동하는 것만으로는 ‘안정적이다’라는 인상을 줄 수 없습니다.
음식이 넘치지 않고, 좁은 공간에서도 흔들림 없이 주행하며, 경사로에서도 멈칫하지 않고 자연스럽게 이동하는 것-이 모든 요소가 갖춰져야 진정한 안정성을 느낄 수 있습니다.
폴라리스쓰리디의 기구메카닉팀은 이를 해결하기 위해 실제 음식 운반과 흡사한 환경으로 모델링한 테스트베드에서 다양한 주행 알고리즘과 하드웨어 최적화를 검증하고 있습니다.
이번 서빙로봇 서스펜션의 업그레이드 프로젝트에서는 특히 두 가지 과제를 집중적으로 다뤘습니다.
- 주행 중 액체 넘침 최소화
- 경사로 주행 안정성 강화
1️⃣ 물넘침 개선을 위한 서빙로봇 서스펜션 구조 최적화
서빙로봇의 주행에서 가장 빈번하게 발생하는 문제 중 하나는 음료나 국물이 주행 중 넘치는 현상입니다.
특히 실제 식당 환경은 실험실 바닥처럼 평평하지 않습니다. 작은 유격, 미세한 요철, 심지어 의자 다리와 같은 장애물이 곳곳에 존재하며, 이러한 충격이 로봇 본체에 그대로 전달되면 쟁반 위의 음료는 크게 출렁이게 됩니다. 이는 곧 고객 불편과 서비스 품질 저하로 이어집니다.
폴라리스쓰리디의 서빙로봇 이리온2는 이 문제를 해결하기 위해 서스펜션 구조를 꾸준히 개선해왔습니다.
쉽게 비유하면, 기존 구조는 마치 돌침대 위에서 몸을 구르는 것과 같습니다. 이 경우 지면의 요철에 대한 충격이 그대로 로봇에 전달됩니다. 반면 개선된 구조는 물침대 위에서 몸을 구르는 것처럼 충격을 흡수하고 부드럽게 분산시킵니다. 즉, 로봇이 받는 진동을 효과적으로 완충시켜 물 넘침을 크게 줄일 수 있는 구조를 구현한 것입니다.
설계 접근 방식
이를 위해 기구메카닉팀은 총 20종류 이상의 스프링을 실제 환경과 유사하게 구성한 테스트베드에서 반복 실험했습니다. 자체 제작한 진동툴을 통해 진동 수치를 정량화했고, 데이터를 기반으로 감쇠력이 최적인 스프링을 찾아냈습니다.
단순한 체감이 아니라, 수치 기반으로 최적점을 찾았다는 점이 핵심입니다. 또한, 구조 개선은 단순히 흔들림 억제뿐 아니라 소음 저감 효과도 동시에 가져왔습니다.
성능 검증 결과
개선된 서스펜션을 적용한 이리온2는 10m 왕복 주행 테스트에서 성능이 확실히 입증되었습니다. 맥주병에 물을 가득 채운 상태로 테스트했을 때,
- 평균 유실량: 0.5cm 이하
- 최대 유실량: 0.6cm
라는 결과를 얻을 수 있었습니다.

이는 기존 대비 큰 개선이며, 실제 서빙로봇 사용자가 체감할 수 있을 정도로 안정적인 성능입니다. 결과적으로 서빙로봇 이리온2는 고객이 음료가 쏟아질 걱정 없이 안심하고 사용할 수 있는 수준에 도달했습니다.
2️⃣ 경사로 주행 안정성: 서빙로봇 서스펜션 하중 분배 설계
경사로 주행에서 서빙로봇이 흔히 겪는 문제는 바퀴 헛돎입니다. 겉보기에는 단순히 힘이 부족해서 발생하는 것처럼 보이지만, 실제 원인은 구동력이 얼마나 효과적으로 지면에 전달되는가에 있습니다.
즉, 바퀴가 아무리 강력하게 회전해도 지면에 충분히 눌리지 않으면, 마찰력이 부족해 헛돌 수밖에 없습니다.
설계 접근 방식
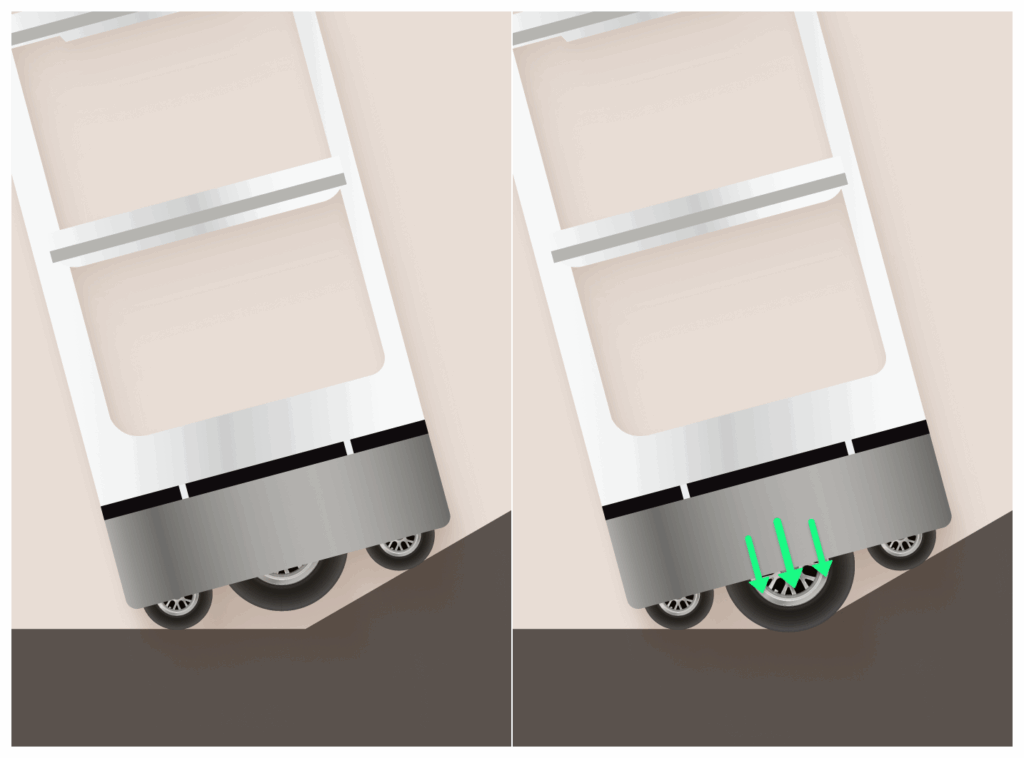
이를 해결하기 위해 이리온2는 구동 허브모터의 위치를 새롭게 설계했습니다.
기존 구조에서는 허브모터와 캐스터가 동일한 높이에서 지면을 받치다 보니, 구동 바퀴가 충분한 하중을 받지 못하는 경우가 발생했습니다. 그러나 개선된 구조에서는 허브모터를 캐스터보다 더 낮게 배치했습니다. 이를 통해 실제 주행 시 허브모터 바퀴가 지면과 더 강하게 밀착되며, 접지력이 강화됩니다.
이 단순해 보이는 구조적 변화는 경사로 주행 성능에 큰 차이를 만들었습니다. 허브모터에 하중이 집중되면서 헛돎 현상이 크게 줄었고, 결과적으로 로봇은 경사로를 안정적으로 오르내릴 수 있게 되었습니다.
이제 서빙로봇 이리온2는 단순히 “올라간다”는 수준을 넘어, 매끄럽고 예측 가능한 주행 품질을 구현할 수 있습니다. 이는 음식이나 음료를 싣고 있는 상황에서도 안정성을 확보한다는 점에서 중요한 의미가 있습니다.
성능 검증 결과
| 항목 | 개선 결과 | 비고 |
|---|---|---|
| 경사로 주행 성능 | 최대 8도까지 정상 주행 | 주행 중 정지 현상 없음 |
| bump(6mm 이하) 대응 | 100% 통과 | 흔들림 최소화, 안정적 주행 완료 |
정리하자면, 허브모터의 위치를 조정해 구동력 전달 경로를 최적화한 것이 이번 개선의 핵심입니다. 단순한 설계 변경이지만, 경사로와 요철 주행에서 체감되는 차이는 매우 크며, 이는 서비스 환경에서 곧바로 고객 신뢰로 이어지는 성능 개선이라 할 수 있습니다.
기술은 결국, 사람을 향해 움직입니다

이번 서빙로봇 서스펜션의 업그레이드 프로젝트는 실제 서비스 환경에서 필요한 안정성을 충족시키며, 경사로 주행, bump 대응, 액체 유실 억제 성능 모두에서 의미 있는 결과를 보여주었습니다.
작은 개선처럼 보이지만, 실제 현장에서 로봇을 사용하는 고객에게는 체감 가능한 차이를 만들어냅니다.
개발자로서 이번 프로젝트는 “현장에서 발견한 문제 → (서빙로봇 서스펜션)기술적 개선 → 성능 검증”이라는 선순환 과정을 다시 한번 경험할 수 있는 기회였습니다. 앞으로도 우리는 실제 사용자의 불편을 해결하는 기술적 해답을 계속 찾아내며, 로봇이 사람과 함께하는 공간에서 신뢰받을 수 있도록 연구를 이어가겠습니다.